

3D Multiple-Input-Single-Output Verfahren und Nahfeld Radareinrichtung
// Elektronik und Elektrotechnik // Informations- und Kommunikationstechnik // Mess- und Regeltechnik
Ref-Nr: 16542
Einleitung / Abstract
Autonomes Fahren ist eins der zentralen Themen des 21. Jahrhunderts. Dabei spielen Radarsensoren eine wichtige Rolle im Bereich der Fahrerassistenzsysteme. Im Gegensatz zu Kameras funktionieren Radarsensoren zuverlässig bei Nacht, Schnee und Nebel. Allerdings weisen einzeln eingesetzte Radarsensoren Nachteile beim Erfassen des Nahfeldes auf. Mehrere Radarantennen, angeordnet auf einem Kreis an der Fahrzeugfront, erhöhen das Auflösungsvermögen bisheriger Radarsensoren und ermöglichen ein 3D-Radarbild der Umgebung.
Abb. 1: Positionen der einzelnen Radarsensoren
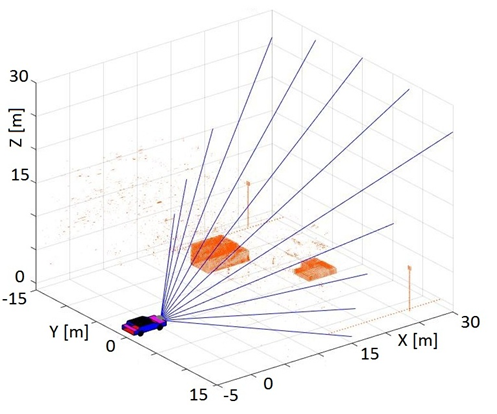
Abb. 2: Rekonstruierte 3D Umgebung des Nahfeldes eines Autos
Hintergrund
Die Radarsensoren eines Fahrzeugs scannen unterschiedliche Winkelbereiche und stellen die Daten dem Fahrerassistenzsystem zur Verfügung.
Problemstellung
Dieser Ansatz hat den Nachteil einer niedrigen Winkelauflösung, besonders im Nahfeldbereich wird dies spürbar. Zudem liefern aktuelle Sensoren keine Information über die Höhe von Objekten.Lösung
Mittels der Methode des "synthetic aperture radar" lässt sich die Winkelauflösung von Radarsensoren verbessern. Anstelle einen Sensor auf einer geraden Linie zu bewegen, können mehrere Sensoren benutzt werden. Unrealistische Abstände von bislang unter 1 mm können auf machbare 4 cm ausgedehnt werden, ohne Bildqualitätsverlust. Als erfinderisch angesehen wird die Antennenstruktur (Anordnung auf einem Kreis) sowie die Steuerung des Systems durch geschicktes An- und Ausschalten der Antennen. Abb. 1 zeigt Positionen der einzelnen Radarsensoren auf einer Kontur und korrespondierende synthetische/virtuelle Antennen: a) reale Antennen auf Kreise-Kontur, b) synthetische Antennen zur Kreiskontur, c) reale Antennen auf Ellipsen-Kontur, d) synthetische Antennen zur Ellipsen-Kontur, e) reale Empfangsantennen auf Kreiskonturen und eine Sendeantenne in der Mitte, f) synthetische Antennen zu Kreiskonturen mit einer Sendeantenne. In Abb. 2 ist die rekonstruierte 3D Umgebung des Nahfeldes eines Autos mit Radar-Kreisantenne an der Front dargestellt. Ein LKW, ein Auto sowie Straßenlaternen werden vom Radar aufgenommen und als 3D Punkte dargestellt. Der Sichtbereich des Radars ist durch Linien gekennzeichnet.Vorteile
Durch die Erfindung soll die 3D-Nahfeld-Rekonstruktion der Fahrzeugumgebung bis etwa 30 m und darüber hinaus bei hoher Winkelauflösung möglich werden
Mittels der 3D Rekonstruktion kann auch die Höhe von Objekten gemessen werden
Auch als Seiten-Radar könnte das System eingesetzt werden
Anwendungsbereiche
Die Erfindung liegt im Bereich der Radar-Fahrerassistenzsysteme.Sie können dieses Fenster schließen. Ihre Suchergebnisse finden Sie in dem vorherigen Fenster
