
VERFAHREN ZUM AUSRICHTEN VON BILDERN AUS NICHT REKTIFIZIERTEN BILDERN EINES STEREOKAMERASYSTEMS
Einleitung / Abstract
Das hier vorgestellte Verfahren zur Kalibrierung von Stereokamerasystemen liegt auf dem Gebiet der Fahrerassistenzsysteme (FAS) in der Automobilbaubranche.
Abb.1: Pipeline
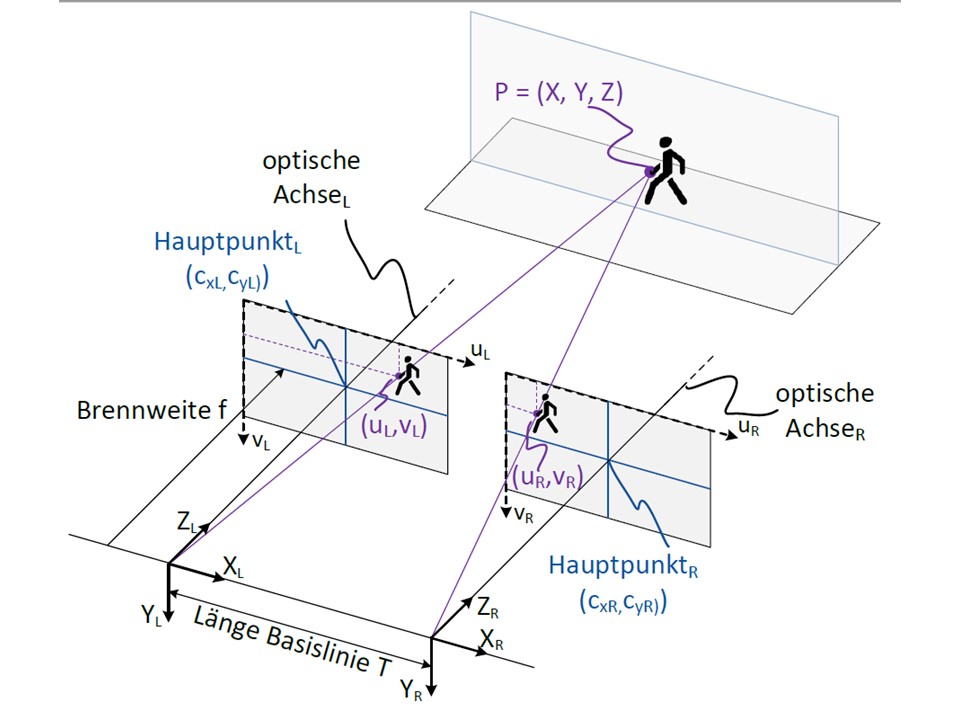
Abb.2: Stereo
Hintergrund
Distanzsensoren auf Basis von Ultraschall-, Infrarot- oder Radarsignalen haben den Nachteil, sich im urbanen Straßenverkehr gegenseitig zu stören. Mit kamerabasierten Fahrerassistenzsystemen können entsprechende Disparitätskarten (Tiefenkarten) ohne den Einfluss derartiger Interferenz-Störungen erstellt werden. Voraussetzung für leistungsfähige FAS ist die Verfügbarkeit exakt zueinander ausgerichteter Kamerabilder. Bei zügiger Fahrt ist jedoch die benötigte genaue Ausrichtung des Stereokamerasystems nicht mehr gegeben. Eine ausgleichende Zuordnung von Bildmerkmalen ist derart rechenintensiv, dass eine echtzeitfähige Bildverarbeitung derzeit nicht möglich ist.
Lösung
Die Diensterfindung betrifft ein Verfahren zur Berechnung von Disparitätskarten aus nicht ausgerichteten Kamerabildern. In den Eingangsbildern der linken und rechten Kamera werden jeweils Bildmerkmale gefunden. Im Anschluss an eine Pixelkorrespondenzsuche zwischen diesen Merkmalspunkten wird die Fundamentalmatrix berechnet und die geometrische Verschiebung der beiden Kameras ausgeglichen. Die geometrische Verschiebung wird ebenfalls zur Einschränkung des Suchraums während der Zuordnung der Merkmalspunkte im nächsten Verarbeitungsschritt genutzt. Aus den rektifizierten Eingangsbildern wird abschließend die Disparitätskarte ermittelt. Durch die Rückführung der Rektifizierungsparameter aus dem vorherigen Bild ist es möglich, den Suchbereich für das Zuordnen der Bildmerkmale derart einzuschränken, dass eine echtzeitfähige Abstandsberechnung realisierbar wird.Vorteile
Sie können dieses Fenster schließen. Ihre Suchergebnisse finden Sie in dem vorherigen Fenster
