
Image alignment method
Abstract
The procedure presented here for the calibration of stereo camera systems lies in the field of driver assistance systems (FAS) in the automotive industry.
Pipeline
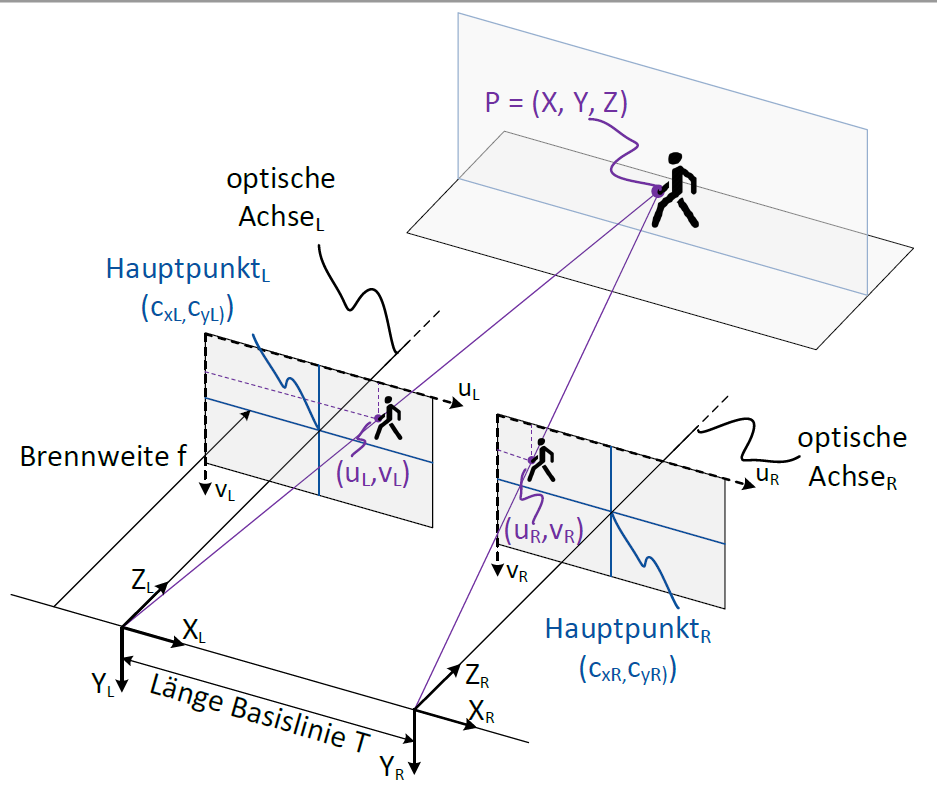
Stereo
background
Distance sensors based on ultrasonic, infrared or radar signals have the disadvantage of interfering with each other in urban traffic. With camera-based driver assistance systems, corresponding disparity maps (depth maps) can be created without the influence of such interference disturbances. A prerequisite for powerful FAS is the availability of precisely aligned camera images. However, when driving at high speed, the required exact alignment of the stereo camera system is no longer given. A compensatory assignment of image features is so computationally intensive that real-time image processing is currently not possible.
Innovation / Solution
The service invention concerns a procedure for calculating disparity maps from non-aligned camera images. Image features are found in the input images of the left and right camera. Following a pixel correspondence search between these feature points, the fundamental matrix is calculated and the geometric displacement of the two cameras is compensated. The geometric shift is also used to limit the search space during the assignment of the feature points in the next processing step. Finally, the disparity map is determined from the rectified input images. By tracing back the rectification parameters from the previous image, it is possible to restrict the search range for assigning the image characteristics in such a way that a distance calculation capable of real time can be realized.Benefits
You can close this window. You can find your search results in the previous window
