
Mechanische Anordnung zur Aktuierung eines robotischen Manipulators für chirurgische Operationen
Einleitung / Abstract
Das Technologieangebot beinhaltet einen innovativen Linearstellmechanismus, der im Vergleich zum Stand der Technik eine gesteigerte Dynamik sowie Modularität bei einem geringeren Bauraumbedarf aufweist.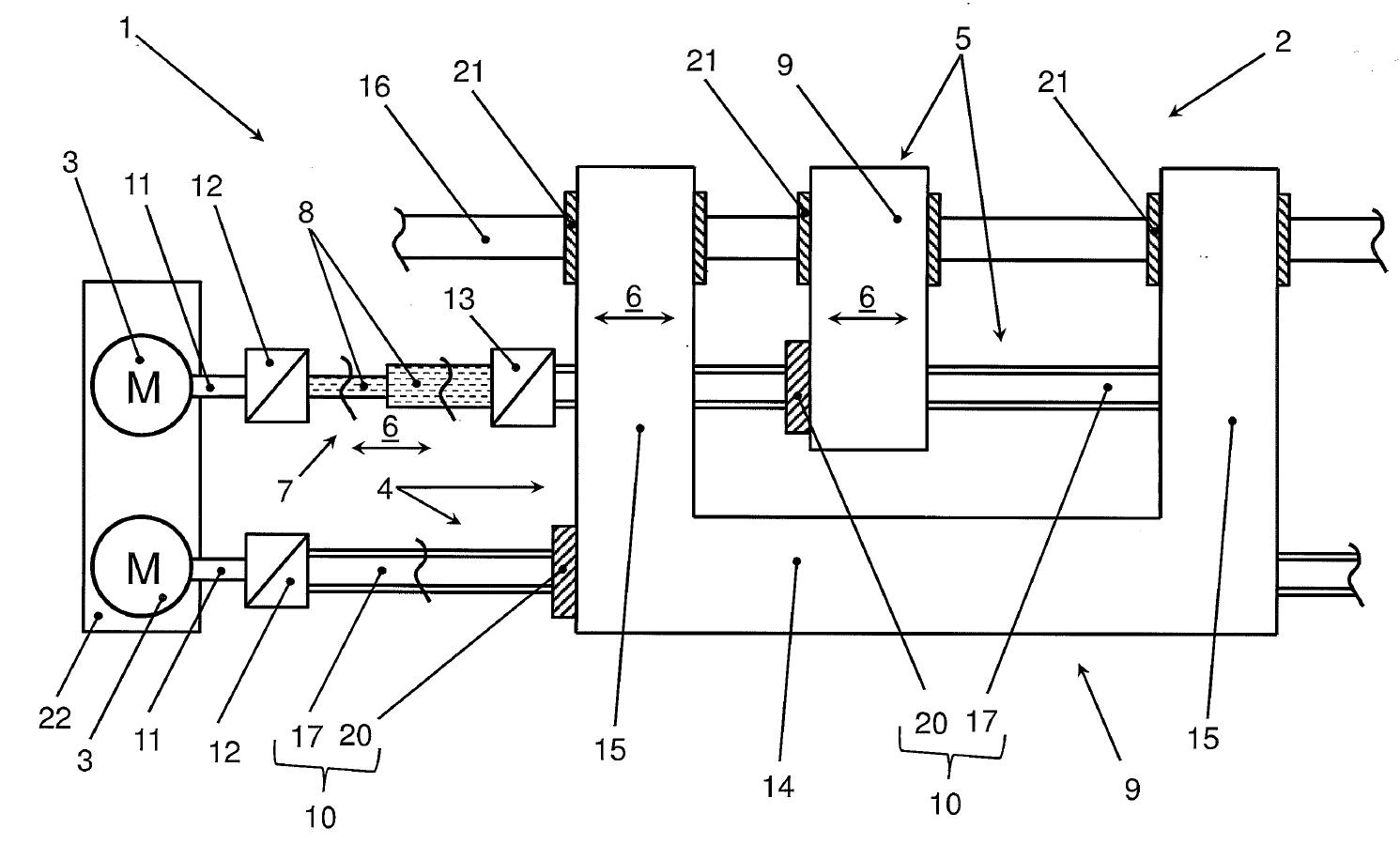
Abb. 1: Motorisch angetriebener Linearstellmechanismus mit einem Schubachsenmodul
Hintergrund
Bei minimal invasiven Operationen haben sich computer- und roboterassistierte Instrumente und Manipulatoren als Teil von Assistenzsystemen durchgesetzt, die dem Operateur ermöglichen, intrakorporal deutlich komplexere chirurgische Techniken anzuwenden. Die Bereitstellung notwendiger Manipulationskräfte erfolgt von einer außerhalb des Körpers angeordneten Aktuatoreinheit. Dafür muss die räumliche Distanz zwischen Instrument und/oder Manipulator sowie Aktuatoreinheit mittels Stellmitteln überbrückt werden. Als Stellmittel finden in bisherigen Systemen Seilzüge Verwendung.
Problemstellung
Seilzüge haben den Nachteil, dass lediglich Zugkräfte übertragen werden können, was dazu führt, dass ihre Anwendung eine paarweise bzw. teilweise gekoppelte Anordnung und/oder Umlenkung bedingt. Dieses führt bei einer Vielzahl an Freiheitsgraden des Manipulators zu einer äußerst hohen Anzahl an zu verwendenden Betätigungs- und Umlenkrollen. Zudem ist eine kontinuierliche Vorspannung der Seile zur schleppfreien Kraftübertragung erforderlich. Dem gegenüber lassen sich flexible Manipulatorenarme auch mittels Stellmitteln in Form von flexiblen Röhren und Stangen realisieren, die sowohl Zug- als auch Druckkräfte übertragen können. Diese erfordern eine lineare Stellbewegung der Stellmittel. Soll die Bewegung mehrerer Abschnitte in Bezug zueinander erfolgen, um ein mechanisches Verspannen von Armsegmenten des Manipulatorarms zu vermeiden, sind die erforderlichen Linearbewegungen der Stellmittel miteinander zu koppeln. Die Kopplung der Linearbewegungen ist im Stand der Technik mit Nachteilen behaftet wie z.B. verminderter Dynamik, gesteigertem Bauraumbedarf, hoher konstruktiver Komplexität und geringem Modularitätsgrad.Lösung
Der Erfindung liegt die Aufgabe zugrunde, einen Linearmechanismus darzustellen, der eine im Vergleich zum Stand der Technik gesteigerte Dynamik sowie Modularität bei einem geringeren Bauraumbedarf aufweist. Der motorisch angetriebene Linearstellmechanismus (s. Abb. 1) weist zumindest ein bewegliches an dem Linearstellmechanismus (1) angeordnetes Schubachsenmodul (2) sowie pro Schubachsenmodul zumindest zwei Stellantriebe (3) und das Schubachsenmodul zudem mindestens zwei Lineareinheiten (4, 5) auf. Mit der erfindungsgemäßen Anordnung kann eine Kompensation der auftretenden Längendifferenzen der Antriebswellen (11) erreicht werden und damit ein Verspannen von Segmenten des Manipulatorarmes verhindert werden. Somit können Positioniereinheiten trotz mechanischer Kopplung und Längendifferenzen unabhängig und mit ortsfesten Motoren angetrieben werden. Zur Realisierung multipler Freiheitsgrade können die Module bspw. konzentrisch angeordnet werdenVorteile
Anwendungsbereiche
Operationen, Chirurgie, minimalinvasive Eingriffe, Roboter, flexible Manipulatorarme, industrielle Positionieraufgaben, Kontinuumsrobotik, Soft RoboticsSie können dieses Fenster schließen. Ihre Suchergebnisse finden Sie in dem vorherigen Fenster
