
Verfahren zur Kalibrierung zwischen Manipulator und 2D Laser Scanner ohne zusätzliche Sensorik oder spezielle Kalibrier Targets
// Elektronik und Elektrotechnik // Optik, Photonik und Lasertechnik // Sensorik und Messgeräte // Software
Ref-Nr: 16953
Einleitung / Abstract
Die Erfindung betrifft ein Verfahren zum Kalibrieren eines Roboters, der einen Endeffektor und eine Positionserfassungsvorrichtung zum Erfassen eines Ziel-Objekts aufweist. Das Verfahren soll dabei mit einem handelsüblichen Stift funktionieren, der beliebig vom Manipulator gegriffen werden kann.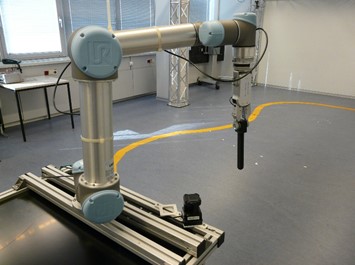
Abb. 1: Kalibrierung zwischen Manipulator und Laserscanner.
Hintergrund
Zunehmend kommen immer mehr Roboterarme in der industriellen Fertigung zum Einsatz. Ein Verfahren für die Kalibrierung zwischen einem Manipulator und einem 2D Laser Scanner wird in dem Paper „Robust Calibration Procedure of a Manipulator and a 2D Laser Scanner using a 1D Calibration Target“ beschrieben.
Problemstellung
Roboterarme (Manipulatoren) müssen teils sehr aufwendig kalibriert werden, um im Zusammenspiel mit einem Laser Scanner Objekte im Raum zu greifen, zu transportieren und auf einen definierten Bereich abzulegen.Lösung
Erfindungsgemäß soll das bisherige Verfahren mathematisch so erweitert werden, dass das Kalibriertarget schief gegriffen werden kann und eine höhere Genauigkeit aufweist. Das erfindungsgemäße Verfahren umfasst die Schritte: (1) Bewegen eines vom Endeffektor gehaltenen Ziel-Objekts auf einer vorgegebenen Trajektorie, (2) Erfassen von Positionsdaten des Ziel-Objekts mittels der Positionserfassungsvorrichtung in Koordinaten der Positionserfassungsvorrichtung und (3) Kalibrieren des Roboters anhand der Positionsdaten. Erfindungsgemäß ist vorgesehen, dass die Trajektorie in einer Ebene verläuft und das Ziel-Objekt unter einem Neigungswinkel relativ zur Ebene verläuft, wodurch der Einfluss des Neigungswinkels kompensiert wird. Der erzielte Fehler nach der Kalibrierung soll dabei kleiner als die Toleranz des Laser Scanners sein. In Abb. 1 ist der erfindungsgemäße Aufbau dargestellt. Zur Kalibrierung kann ein zylindrisches Kalibriertarget oder ein Handelsüblicher Stift verwendet werdenVorteile
Es wird im Vergleich zu bestehenden Verfahren für die Kalibrierung kein speziell angefertigtes Kalibriertarget benötigt.
Die Genauigkeit ist besser als die des aktuellen State-of-the-art.
Das Kalibriertarget kann beliebig vom Manipulator gegriffen werden. Somit soll das erfindungsgemäße Kalibrierungsverfahren sowohl automatisiert als auch von ungeschulten Personal eingesetzt werden können.
Anwendungsbereiche
Das Anwendungsgebiet umfasst die Kalibration von mobilen Roboterarmen, steht im Kontext der Industrie 4.0 und kann bei der Rekalibrierung von stark beanspruchten industriellen Anlagen (z.B. in der Lebensmittelindustrie) zum Einsatz kommen.Sie können dieses Fenster schließen. Ihre Suchergebnisse finden Sie in dem vorherigen Fenster
